ikeken2024/04/08UT 皆既日食コロナ(HDR, R-USM)
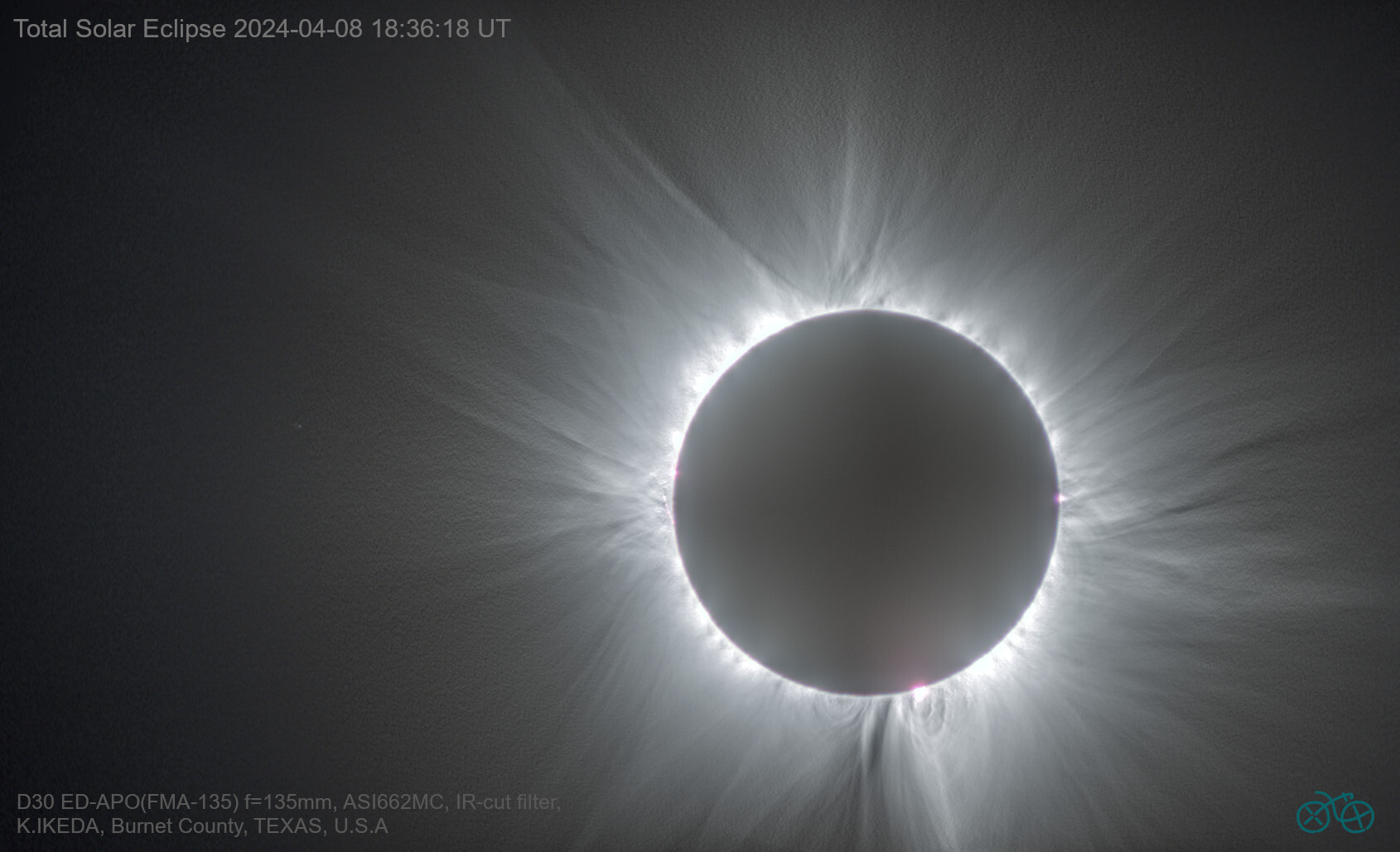
前回投稿したコロナの多段撮影のHDR画像に対し、R-USM処理を行いました。 心配していたよりはノイズが少なく(と言ってもまだ多いで今後の課題)、R-USMの処理にそこそこ耐えてくれました。 単なるHDRより迫力を感じます。このような強調処理を考案した先人に敬意を表します。
#107596
2024年4月9日 3時36分18秒
1ms GAIN0 ~ 32ms GAIN60, 8段階, 各露出3~8枚程度自動撮影
Camp Creek park, Burnet County, TEXAS, U.S.A
望遠鏡:その他 Askar FMA-135・ZWO製 IR cut filter
カメラ:ZWO ASI662MC
スカイメモS, SharpCap Pro 4.1 + 自作python script
135mm
HDR画像までは前回の投稿と同じ。回転アンシャープマスク処理はpython opencvで実装
HDR画像をLabに変換、L画像に対し
1.中心をcv2.HoughCirclesで算出
2.極座標から直交座標に変換(cv2.warpPolar)
3.輝度傾き最大を半径(太陽の縁)とし直線性を確認。曲がってたら直交検波でより正しい中心点を算出
4.3を繰り返し、高精度な中心を算出(たぶんここまでは必要ない)
5.直交座標系で欠落した部分のデータを補完(scipy.optimize.curve_fitで正弦波にfit(基底と2次まで))
6.円周方向にhann窓のwindowを環状畳み込みしてunsharp波形を作り、差分を拡大し、R-USM処理
R-USM処理はwindowサイズ401,500倍、51,500倍、11,50倍とした。ただし、太陽の中については未処理。
内部コロナで急に処理を入れると不自然になるため、半径1.0~1.05倍の位置にwindowをかけた
また、外周部はノイズが目立つため、半径1.7~3倍の位置にwindowをかけ、その外は未処理とした
最後に元のLabのLをR-USM処理画像に置き換えて出力
なお、直交座標から極座標に戻す際に線上のノイズが乗ったため180回転した画像に対し同じ処理を行い排除した
関連作品
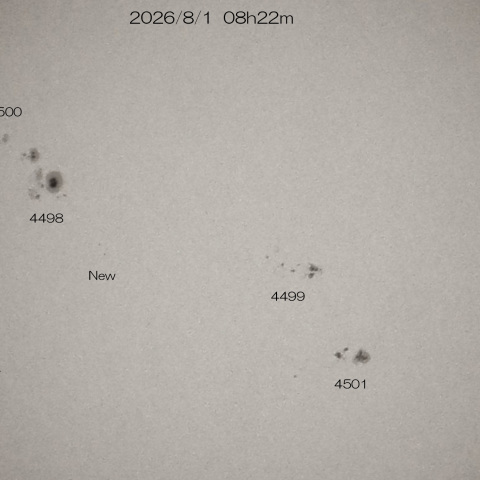
2026/8/1 太陽
小犬のプロキオン
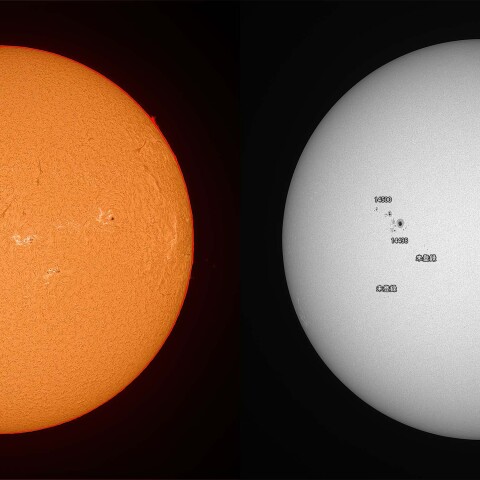
太陽 2026/08/01
kino
8月1日の太陽①(正面 )
toritori
8月1日の太陽➁(4500,4498 )
toritori

Sun 2026/08/01
starstation
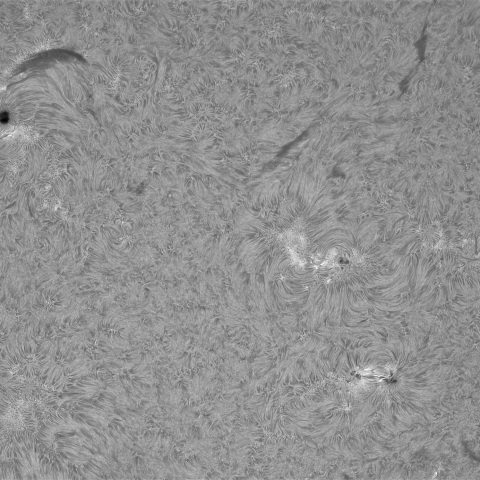
太陽
yasu9999
活動領域 4498,4500:2026/01/01
新井優
太陽面
大島 修
08/01の太陽
天文バカボン町田支部
太陽
nekojun

Sun 2026/07/31
starstation

PR