小惑星探査機「はやぶさ」
「はやぶさ」の目的と技術
「はやぶさ」とその目的
「はやぶさ」は、日本のJAXA(宇宙航空研究開発機構)が開発して打ち上げた、小惑星探査機です。小惑星「イトカワ」とランデブーを行い、表面でサンプルを回収して地球に持ち帰るのが最大の目的です。成功すれば月以外の天体から初めてのサンプル・リターンになります。
「はやぶさ」がもたらすのは、「イトカワ」の破片とそこから得られる知識だけにとどまりません。数々の新しい技術が、このミッションによって実証され、今後の惑星探査に生かされることが期待されているのです。サンプル・リターン以外について見ても、惑星間空間の飛行には「イオンエンジン」と呼ばれる先進的な推進装置が用いられましたし、「ミネルバ」という、手のひらに乗る超ミニサイズのランダーを「イトカワ」に降ろすことが予定されています。
軌道と日程:(上)小惑星に到着するまで、(下)小惑星を離れて地球に帰還するまで【クリックで拡大】
探査機は、2003年5月9日にM-V型ロケットによって鹿児島県内之浦のロケット発射場から発射されました。開発時の名前は「MUSES-C」でしたが、伝統通り、軌道投入に成功したときに愛称がつけられました。それが「はやぶさ」という名前です。
しばらく地球に近い軌道を巡った後、2004年5月19日に地球スイングバイを行って「イトカワ」に向かい、2005年9月12日に「イトカワ」から20kmの位置に静止しました。今後は、11月には「ミネルバ」の放出とサンプルの採取を行い、「イトカワ」から地球への帰り道を旅します。2007年の夏ごろに地球に到着、「イトカワ」のサンプルを格納したカプセルが放出され大気圏に再突入し回収される予定となっています。
探査で何がわかるのか
小惑星は「太陽系の化石」といわれるように、原始太陽系における、惑星に成長する前の微小天体の姿をそのままとどめていると考えられています。小惑星を探査して、さらにサンプルを持ち帰って分析することは、太陽系の成り立ちを研究する上でとても重要なことだといえるのです。これに対して、地球のような大きな天体は、形成されたときにいったん溶けて、内側の核と外側の地殻・マントルに成分が分かれてしまいました。これまで唯一、サンプルが採取され地球へ回収されたことのある月も、例外ではありません。
「はやぶさ」に使われている技術
はやぶさは、小惑星探査機であると同時に工学実験探査機でもあります。将来の惑星探査に欠かせない数々の技術が「イトカワ」の探査とサンプル・リターンを行う中で実証されるのです。
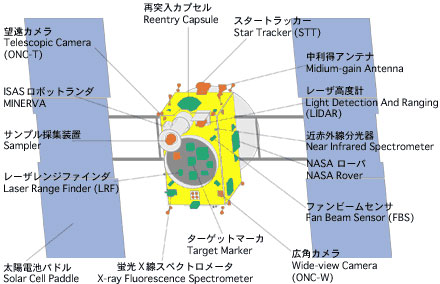
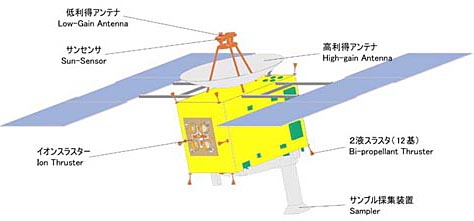
「はやぶさ」に搭載された装置(提供:JAXA)【クリックで拡大】
代表的なのは以下の4つで、すべてを実用化したのは「はやぶさ」が世界初です。
イオンエンジン
これまで、軌道を変更したり加速・減速するのに用いられるロケットエンジンといえば、化学燃料を燃やして噴射する燃焼式ロケットでした。もちろん、「はやぶさ」の打ち上げの際にも燃焼式ロケットが使われています。
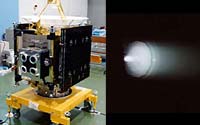
(左)組み立て中の「はやぶさ」、手前に四基のイオンエンジンが見える/(右)地上での試験運転の様子(提供:JAXA)
一方、地球から「イトカワ」までの惑星間空間を旅する間の加速には、「イオンエンジン」と呼ばれる、新しいタイプのエンジンが採用されました。

まず、搭載された推進剤を揮発させ、静電気を帯びさせます。そのイオン化された粒子を、電気(電場)の力で高速に加速し、噴射するというものです。燃焼式ロケットに比べると、同じ時間でわずかな「燃料」しか消費しません。推進のパワーそのものは小さいのですが、長時間の連続噴射が可能なので、長い目で見ればひじょうに効率よく、大きな力を発揮することができるのが特徴です。
イオンエンジンを使ってイトカワへ向かう「はやぶさ」の想像図(提供:JAXA)
自律制御と「ミネルバ」
目的地である小惑星「イトカワ」までは電波でも往復に何十分もかかる上、そもそも正確な形がわかっていません。そのため、「はやぶさ」にはさまざまなセンサーが搭載され、小惑星の形や距離を正確にとらえた上で探査機自身が次の行動を考えます。さらに、サンプル採取のために「イトカワ」に接近する際には、あらかじめ人工的な標的である「ターゲットマーカー」を落下させます。ちなみに、ターゲットマーカーの一つは世界中から寄せられた88万人分の名前が刻まれたアルミフィルムで覆われています。

観察は離れたところから行われるだけではありません。手のひらに乗る超ミニサイズのランダー、「ミネルバ」が降ろされるのです。回転するホイールの反動を利用してはね回るという、ユニークな方法で小惑星表面を移動します。この「ミネルバ」にはステレオカメラが備え付けてあるので、まるで「イトカワ」表面にいるような臨場感あふれる立体画像を見ることができることでしょう。
微少重力環境に対応した小型ロボットランダー・ミネルバ(提供:JAXA)
サンプル採取
最大の目玉であるサンプルの採取ですが、通常の方法ではうまくいきません。地球上ならスコップで掘るだけですみそうですが、「イトカワ」は小さく、ほとんど重力がないので、表面に何かを押し当てると反動で宇宙へと跳ね返されてしまいます。そもそも、表面が砂なのか岩石なのかもわかっていません。
そこで考え出されたのが、小さな弾丸を高速で打ち込んで、放出された破片を採取するという方法です。採取する装置は「サンプラー・ホーン」と呼ばれる、ラッパ(あるいはジョウゴ)状の筒で、この先端を表面にあてがいながら採取を行います。重力が非常に小さいことを逆手にとり、わざわざ吸引しなくても飛び散った破片を回収できるそうです。ちなみに、サンプラー・ホーンが「イトカワ」の表面に触れてからまた戻るまでの時間はわずか1秒。スッと接近して、獲物をつかんでサッと上昇するからこそ、愛称が「はやぶさ」なのです。
地球への帰還

ミッションの最後は、地球でサンプルを回収することです。直径40cmの小型回収カプセルは、惑星間軌道から直接放出され、秒速12kmを超える速度で大気圏に突入します。このときに発生する熱は、アポロの数倍、スペースシャトルの数十倍にもなります。そのため、カプセルには最先端の耐熱材料が使われています。着陸地点は、オーストラリアの砂漠地帯の予定です。
大気圏突入後、パラシュートを開くカプセルの想像図(提供:JAXA)【クリックで拡大】
小惑星「イトカワ」とは
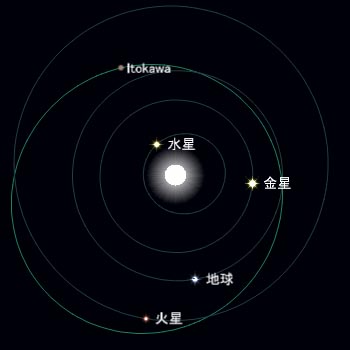
「小惑星」といえば、これまで軌道がわかっているだけでも数万個あり、とりわけ火星と木星の間の「小惑星帯」に数多くあることが知られています。これに対して、「イトカワ」は地球軌道を横切るような特殊な軌道を回っています。
イトカワの軌道と他の惑星の軌道の比較【クリックで拡大】
「イトカワ」が発見されたのは1998年9月のことです。「はやぶさ」が打ち上げられた時点で、この小惑星は発見された日時に基づく符号、「1998SF36」で呼ばれていました。その後、2003年10月に「Itokawa(イトカワ)」と命名されました。ペンシルロケットの開発者、糸川英夫氏にちなんだ名前です。1955年に行われた、ペンシルロケットの発射実験がその後50年に及ぶ日本の宇宙開発の出発点となったのです。
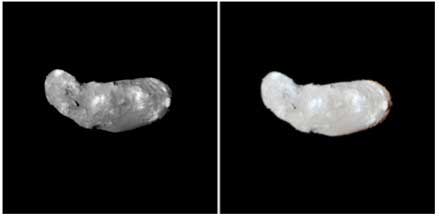
「はやぶさ」が撮影したイトカワの合成カラー画像(9月11日19時24分(日本時間)撮影、距離約25km、視野は2度角)(提供:JAXA)【クリックで拡大】
「はやぶさ」が着く前、「イトカワ」の形や性質についてはほとんどわかっていませんでした。「はやぶさ」が接近に成功したことで、日々新しい情報が入ってきています。「イトカワ」は予想されていたよりも小さくて細長く、また表面は砂が少なく岩盤が露出しているようです。